
Los grippers constituyen uno de tantos desarrollos tecnológicos que se inspiran de forma fiel en la observación de la naturaleza, pues su funcionamiento imita la operación de las manos como herramienta por excelencia para la manipulación de toda clase de objetos. Lo cierto es que no es posible hablar de grippers plenamente sin referirse a los cobots y su rol dentro de la industria o las empresas. Actualmente, estos colaboradores robóticos van teniendo cada vez más aplicaciones comerciales en diferentes lugares del mundo. Mientras, en este blog, te compartiremos algunas características generales de los grippers en relación, por su puesto, con sus inevitables compañeros: los robots colaborativos.
Un gripper es un tipo de efector final, el cual se define como dispositivo o herramienta conectada en el extremo del robot para realizar toda clase de tareas. En el caso de los grippers, su función básica es sujetar. Tal como los humanos tenemos la capacidad para agarrar diferentes tipos de objetos y nos valemos de la fuerza de nuestros dedos para conseguir un mejor agarre, los grippers están conformados por elementos que emulan los dedos de las manos. De acuerdo con esto últimos, los grippers pueden tener diversas clasificaciones; te mencionamos un par de ellas con base en su forma de sujeción:
Gripper paralelo: el movimiento de este tipo de grippers incluye dedos que se mantienen siempre paralelos para lograr la sujeción o liberación de los objetos. La orientación desde la cual el gripper se acerca al objeto depende de la forma en que este debe ser sostenido (según su geometría o solidez).
Gripper angular rígido: estos grippers tienen dedos cuyo movimiento de apertura y cierre es llevado a cabo en relación con un eje fijo, por lo que, realizan movimientos circulares para poder tomar la pieza. En un contexto operativo, esto puede implicar mayor espacio de trabajo.
En otro sentido, también cabe considerar las tres formas básicas en las que un gripper puede sujetar las piezas: rodear, retener y por fricción. Las dos primeras formas son las más utilizadas porque el gripper puede sujetar el objeto de forma estable y con menos fuerza (aunque implica una carrera adicional). En cambio, la sujeción por medio de fricción depende completamente de la fuerza del gripper.
En todos los casos mencionados, una regla general es que la pinza debe sujetar a la pieza de trabajo por su centro de gravedad, pues esto ocasiona que se anulen los momentos que se puedan generar debido al peso de la pieza de trabajo.
Los grippers son claves para la robótica colaborativa
Cada aplicación tiene necesidades específicas y, con base en ello, al integrar un robot es importante enfocarlo hacia las labores concretas para las que será programado; por ello, la integración de un efector final es pieza clave, pues se desempeña como la mano del robot. Así, un efector final constituye, básicamente, el objetivo comercial del robot. Si un robot carece del efector final, prácticamente carece del equipo que le permite cumplir el propósito para el que fue adquirido. Especialmente, los brazos robóticos articulados son programados para alcanzar o colocar objetos en una ubicación determinada; estas acciones pueden consumarlas solo mediante un efector final; de lo contrario, su existencia se consideraría redundante.

Algunos investigadores llegan a la conclusión que la mano humana es un dispositivo avanzado después de haber evolucionado por selección natural. Por lo tanto, esto señala aunque no de manera definitiva, que los ingenieros deben imitar a las manos del hombre en el diseño y la construcción de las pinzas o herramientas finales del robot, para obtener un mejor resultado.
Del Villar, Carlos Raúl. Diseño y construcción de un gripper experimental…
Pues bien, los grippers o pinzas robóticas son montados físicamente en la muñeca del manipulador y, después, son fijados mediante conexiones de alimentación. Cabe mencionar que, las conexiones pueden ser de tipo hidráulica, neumática o eléctrica. En nuestro blog “Grippers… ¡libera tus manos!” podrás conocer una descripción breve de cada uno de estos tipos de accionamiento. Mientras, cualquiera que sea el tipo de accionamiento, el principal componente de fuerza proviene del eslabón base y, como tal, es el que produce el movimiento.
Actualmente, los grippers utilizan actuadores en cada una de las articulaciones con el fin de obtener mayor flexibilidad en los movimientos conjuntos del manipulador robótico. Lo anterior significa que cada enlace puede generar más energía de forma individual y, así, el efector final del robot puede aprovechar toda la energía del actuador que está conectado a la muñeca. Esto permite que el efector final levante objetos más pesados y tenga mejor agarre aun en entornos no estructurados.
¡La mejor tecnología para grippers!
Tener en cuenta la tecnología del gripper conforme al cual el robot llevará a cabo sus funciones es clave para una operación eficiente y óptima. Especialmente, los sistemas electromecánicos suministran la energía necesaria para proporcionar la velocidad y la capacidad de carga requerida. Además, son sistemas de alta precisión y repetibilidad que emplean tecnología limpia y que pueden ahorrar costos de mantenimiento.
Descarga el e-book gratuito ¿Tus aplicaciones aún emplean energía neumática e hidráulica?
Los sistemas eléctricos pueden mover robots a altas velocidades, requieren servomotores de CC o motores paso a paso de CC y pueden integrar juntas rotativas y lineales. Los robots pequeños, así como los sistemas que requieren gran precisión y consistencia suelen emplear los beneficios del sistema de accionamiento eléctrico. En URANY podemos compartirte un ejemplo excelente de gripper eléctrico, innovador y en existencia en nuestro almacén, gracias a nuestra colaboración con DH Robotics. Además de ser grippers disponibles a la brevedad como solución para tus cobots, estos efectores finales cuentan con el respaldo en investigación y desarrollo del Profesor Jian S. Dai, Científico Jefe de DH Robotics.
La fórmula del gripper
Entre otros aspectos que debes considerar cuando decides integrar grippers eléctricos a tus componentes robóticos, se encuentra el agarre del gripper, pues debe ser lo suficientemente fuerte y flexible para soportar el peso del objeto, sin afectar el movimiento y la aceleración producidos por la manipulación continua del mismo. Por lo tanto, es indispensable calcular la cantidad de fuerza requerida por la pinza para agarrar una pieza.
Un proceso de cálculo para seleccionar toda clase de componentes de automatización es bastante complejo y, necesariamente, requiere la intervención y el apoyo de expertos en la materia. Sin embargo, es posible compartirte nociones comunes que puedes tomar en cuenta desde ahora con el fin de iniciar tu selección del gripper ideal. Para tal fin, Esha Chakraborty, en su artículo para el sitio lambdaGeeks, menciona la fórmula que permite encontrar la fuerza requerida por el efector final del robot para conseguir el agarre necesario sobre un objeto.
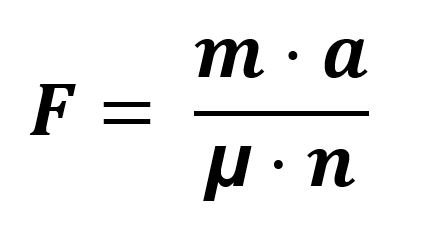
donde
F= fuerza necesaria para sujetar el objeto
m= masa del objeto
a= aceleración del objeto
µ= coeficiente de fricción
n= número de dedos en la pinza
En relación con dicha fórmula, Chakraborty aclara que la ecuación anterior es tan solo una generalización y, por lo tanto, se considera incompleta en una variedad de situaciones. Así que, para aplicarla en un contexto más realista, la gravedad debe ser considerada en las variables del cálculo, pues ello resuelve las fluctuaciones en la fuerza de gravitación producidas con respecto a la dirección del movimiento (por ejemplo, el movimiento hacia arriba del objeto contra la gravedad necesita más fuerza en la pinza en comparación con el movimiento hacia abajo).
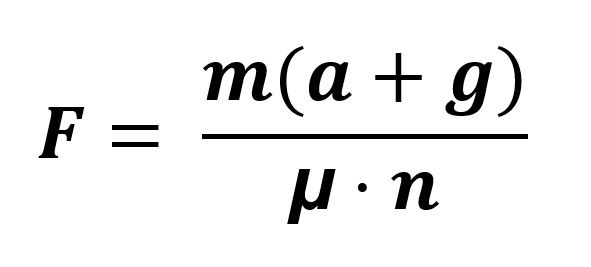
Donde g es la aceleración de la gravedad y a es la aceleración que corresponde al movimiento del objeto.
Finalmente, solo queda advertir que, al seleccionar un gripper, también es necesario tomar en cuenta un criterio asociado con la tarea que, específicamente, llevará a cabo. Esta orientación ayuda a conseguir una comprensión sólida que garantiza el agarre seguro y eficiente por parte del efector final. En URANY no solo tenemos disponibles grippers para entrega inmediata porque forman parte de nuestro stock actual, sino que, también te podemos ayudar a seleccionar el componente ideal para desempeñarse en conjunto con tu cobot. No dudes en ponerte en contacto con nosotros para conocer más de nuestro servicio de cálculo y cotizar el gripper que necesitas sin demora.
URANY es tu aliado en transportadores, robótica, control de movimiento y componentes de automatización.




